What is robotic surgery with the da Vinci Surgery system?
The wonders of technology can be truly impressive and sometimes daunting. The idea of a robot operating on a human being (for example, on you) could certainly be considered intimidating. So when doctors say they would recommend a procedure using the da Vinci Surgery robotic system, does that sound like a robot is going to perform the operation? Actually the da Vinci system is an ‘Intuitive Surgical Endoscopic Instrument Control System.’ That means the da Vinci system is a combination of computers, electronics and machinery that provides a surgeon with an intuitive tool for seeing and controlling surgical instruments during an operation.
Wristed Control System

The key point is that the da Vinci system is robotic – it uses robotic arms and instruments – to assist the surgeon. Surgeons perform the procedure in the same sense as if wielding the tools of the trade in their own hands, only in this case the instruments are in robotic ‘hands.’ However, the surgeon is always and in every way in control. The da Vinci system is not programmed to perform the procedures; it makes no decisions and in fact makes no movements that aren’t originated by the surgeon.
Robotic Procedures require a Team approach

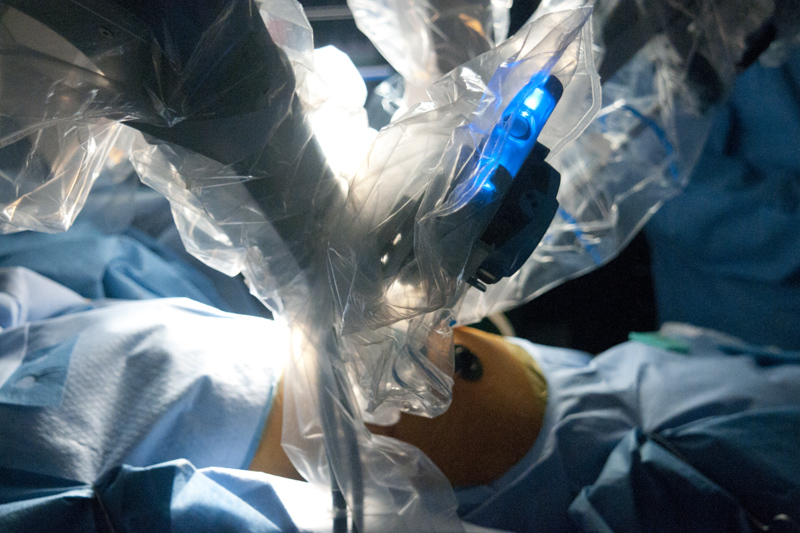
What the da Vinci machine does is make it possible for the surgeon to operate inside the body through the smallest possible incisions (sometimes called surgical portals), which are about the size of a dime, and to make very fine and precise movements with surgical instruments aided by a highly sophisticated three-dimensional camera. The end result for many kinds of procedures is the ultimate in minimally invasive surgery, surgery that cuts and disturbs as little of the body as possible.
Surgeons who use the da Vinci system are first and foremost traditionally trained physicians, most of whom are trained in laparoscopic and thoracoscopic surgery and comfortable to perform these surgical procedures in an open procedure by their own hand. However the da Vinci system gives them capabilities that manual surgery can’t provide. For one thing, it’s not necessary to insert anything as large as the human hand into a patient’s body. The ‘arms and hands’ of the da Vinci system are ultra-precision machinery, miniaturized, versatile and capable of uniquely fine surgical movement in a very small space.
In order to master the da Vinci system, surgeons spend hundreds of hours in additional training and practice. Every procedure that a surgeon performs with the da Vinci system has been carefully developed for that system. It frequently requires years for these procedures to be planned, tested and approved. In addition every procedure is supported by a team of doctors and nurses who are also specifically trained to assist the patient and primary surgeon while undergoing a da Vinci system procedure. The da Vinci system equipment is central to the procedure, but this remains very much a human controlled and supported operation.
The da Vinci Surgery System is a product of Intuitive Surgical, Inc.
The commercial version of the da Vinci system, developed by Intuitive Surgical, Inc. of Sunnyvale, California, was approved by the United States Food and Drug Administration (FDA) in 2000 and has had many generations of refinement and further development. Incidentally, it was name da Vinci because like the great artist, anatomist and scientist Leonardo da Vinci, the da Vinci system combines anatomical expertise with creative surgical skill. These days da Vinci systems are in use worldwide in hundreds of hospitals. There are literally hundreds of procedures performed with da Vinci systems, often major operations ranging from tumor removal to nervous system repair.
From the beginning, the da Vinci system was designed not to replace the skills of a surgeon but to augment them with technology. The keys to the approach were the development of miniature surgical instruments that could be manipulated with extremely fine and precise movements and the use of a computer enhanced, stereoscopic camera to give the surgeon the clearest possible three-dimensional (3-D) view of the work area (surgical field). These elements required numerous highly specialized and patented mechanical innovations and a novel computer/software system to coordinate the system.
What is it like for a surgeon to work with a da Vinci Surgical system?
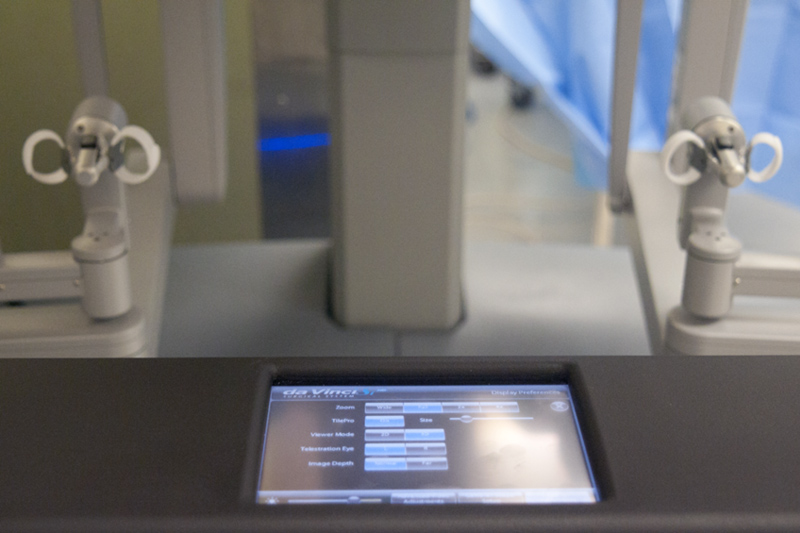
Unlike traditional surgery where the surgeon stands over the patient sometimes for hours on end, the surgeon using the da Vinci system is seated and looks into a control console rather than directly at the patient. The console is in the operating room and the patient is visible to the surgeon, but the business end of the equipment is on a patient cart placed next to the patient and supporting the four robotic arms used by the system. The surgeon performs the operation by using both hands and feet to control the surgical arms and instruments, guided by the images provided by computer monitor at the console. Obviously using the da Vinci system requires a great deal of hand-eye coordination; some surgeons say it reminds them of very sophisticated electronic game consoles – although with a more serious purpose, of course.
Computerized Systems filter tremor
Many surgeons compare the da Vinci system approach to traditional laparoscopy (performing surgery or diagnostics through small cuts in the abdomen). One big difference is that with laparoscopy the surgeon is standing and views the surgical field on a two-dimensional monitor positioned above the patient while the camera (laparoscope) is manipulated by an assistant. In the da Vinci system, as mentioned the surgeon is sitting and uses the 3-D images from a camera controlled by the surgeon. Another difference is that laparoscopy uses hand-held and non-articulating instruments. The da Vinci system instruments can be flexible and they articulate – they can move like (or better than) human hand and finger joints, for example, in movements known as ‘wristing.’
Another more subtle advantage built into the da Vinci system arms and instruments is the ability to ‘scale’ and ‘filter’ the control exerted by the surgeon at the console. In the da Vinci system the combination of electronics and mechanics responds to each surgeon’s movement characteristics. The system is able to smooth out the levels of force applied by the surgeon, called scaling, and remove random movements – such as the jitters – by filtering. The result is a smooth, consistent and precise movement by the mechanical arms and instruments. That is one reason why some surgeons may prefer the da Vinci system for complex procedures that require very precise actions on very small targets.
What is this kind of surgery like for the patient?
Overall, the result of minimally invasive surgery performed by a robotic system is a less stressful procedure. This is not only in the sense that less cutting is done during the procedure, but that pre-operation and post-operation are similar to most procedures, routine and undramatic. For many people, the thought of minimally invasive technique is less disturbing even when the procedure itself is considered a major operation.
The most important factor for most patients is that by eliminating large access incisions and by performing minimal and precise actions at the target, the recovery and convalescence period is generally easier and has fewer complications. Obviously there is usually less to heal, less area exposed to infection, and less general trauma to the body.
Technological applications reaching for better outcomes
Intuitively it’s not difficult to understand why minimally invasive surgery is an approach gaining momentum in modern surgery. It’s a case where generally less is better. That does not, however, make this type of surgery easy or always the best approach. It’s true that many procedures with the da Vinci system require somewhat more time than other methods. For the surgeon, visualizing the surgical field on a monitor is never the same as it is looking directly at live tissue, nor is the feel of remote control always comfortable for some kinds of surgery. There are surgical procedures that lend themselves to minimally invasive surgery with a da Vinci system, others do not – at least for now.
Perhaps this is a function of a relatively new technology; in time surgeons will become more accustomed the robotic assisted approach – something like how their children usually take so naturally to computers and electronic devices of all kinds. It’s also true that the technology continues to improve. With the aid of computer intelligence, the visualization of a procedure and the support for surgical movements is likely to become better and even more precise. Further improvements with visualization, energy devices and control may expand the roll of robotics in the near future.
